Med den kraftfulla utvecklingen av den elektroniska industrin ändras positionsdetekteringen av vissa strukturella komponenter långsamt från den ursprungliga kontaktmätningen till den beröringsfria mätningen genomHalllägesgivare och magnet. Hur kan vi välja en lämplig magnet enligt våra produkter och struktur? Här gör vi en enkel analys.
Först måste vi bestämma magnetmaterialet. För närvarande används samarium koboltmagnet och neodymjärnbor i stor utsträckning i hallpositionssensorer. Den största skillnaden mellan de två magneterna är att baserat på samma volym är NdFeB-magneter starkare än samarium-koboltmagneter; den termiska exkursionen för samariumkobolt är mindre än den för Nd-Fe-B; oxidationsmotståndet för samariumkobolt är starkare än Nd-Fe-B, men i allmänhet finns det en beläggning på utsidan av magneten, som kan lösa problemet med oxidation; samarium-koboltmagneten har bättre temperaturbeständighet än NdFeB-magnet, men temperaturresistansvärdet för båda magnetmaterialen kan nå mer än 200 ℃. När vi väljer typ av magnet bör vi därför utvärdera den i kombination med kostnadsprestanda, arbetstemperatur och arbetsmiljö. I allmänhet kan NdFeB användas mer, främst för att det har de bästa magnetfältsegenskaperna. Men när man arbetar i ett brett temperaturområde, rekommenderas det att välja samarium koboltmagnet på grund av dess lilla termiska drift.
Dessutom måste vi bestämma några grundläggande parametrar för magneten. Enligt testpositionsinformationen och objektets rörelseriktning bestämmer vi om magnetens magnetiseringsriktning är diametral eller axiell. Dessutom bestäms om man ska välja enfyrkantig magneteller acylindermagnetenligt installationsstrukturen. Naturligtvis behöver vi ibland anpassa formen på magneten enligt strukturen. Det finns en annan kravfaktor när det gäller magnetflöde, vilket alltid har varit vårt intresse för val av magneter. Faktum är att vi måste analysera det i följande två aspekter:
1. Den magnetiska fältstyrkan som induceras av själva hallpositionssensorn och det inducerade magnetfältsområdet i varje riktning kommer att vara tydligt markerade i sensordataboken.
2. Avståndet mellan magneten och själva sensorn bestäms i allmänhet av produktens struktur. Enligt ovanstående två aspekter och magnetfältets förändringskurva i figuren nedan som ett exempel, kan vi bestämma magnetfältstyrkan för den önskade magneten.
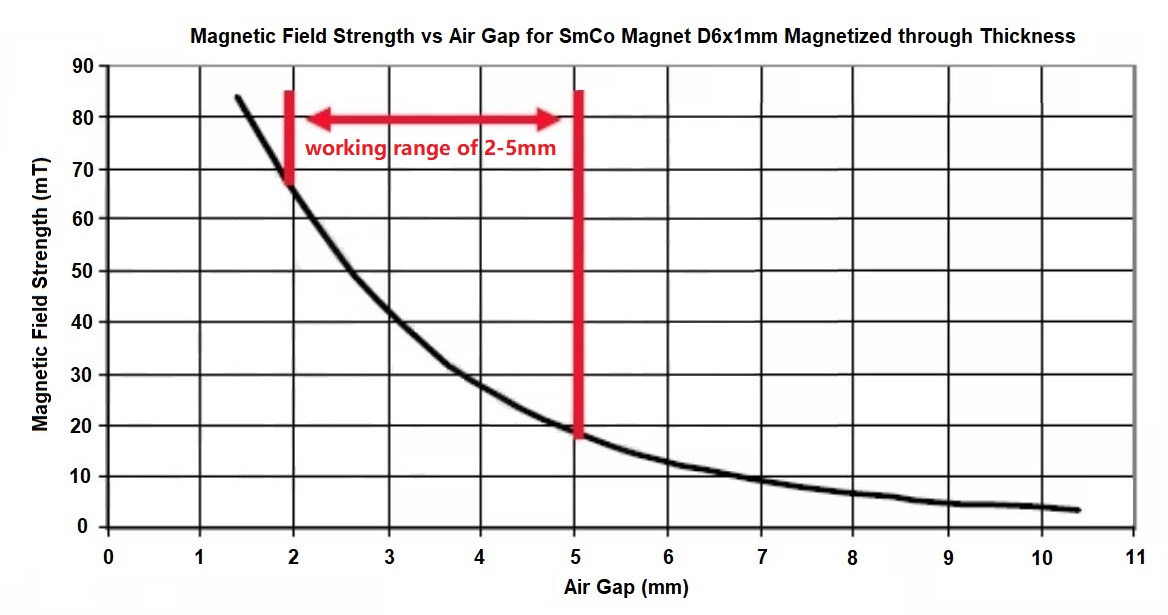
Slutligen måste vi förstå att det inte betyder att så länge som magnetfältet faller på sensorns räckviddskrav kan magneten vara så långt borta från sensorn. Även om sensorn i sig har kalibreringsfunktion, måste vi förstå att när magneten är för långt från sensorn är fördelningen av själva magnetfältet svår att säkerställa linjäritet eller nära linjäritet. Detta innebär att med ändringen av position och den olinjära fördelningen av själva magnetfältet kommer sensormätningen att bli komplex och kalibreringen blir mycket komplex, så att produkten inte har reducerbarhet.
Ovanstående är bara en enkel analys av magnetval i Hall-sensorapplikationer. Vi hoppas att det kommer att vara till hjälp för dig. Om du har andra frågor under utvecklingsprocessen, vänligen kontakta oss,Ningbo Horizon Magnetics. Vi kan kommunicera vidare och ge dig teknisk support.
Posttid: 2021-aug-12